import numpy as np
import matplotlib.pyplot as plt
import climatecritters as cc
from climatecritters.model_critters.stommel import Stommel{}Every model in ClimateCreatures inherits from CCModel. CCModel.integrate() returns a CCOutput object that carries the full trajectory and exposes output-focused operations. This notebook covers the shared interface both classes provide. Examples use Stommel as a concrete stand-in, but the same patterns apply to every model.
CCModel, CCOutput, param_values, integrate, register_forcing, set_function, to_pyleo, callable parameters, base class
import numpy as np
import matplotlib.pyplot as plt
import climatecritters as cc
from climatecritters.model_critters.stommel import Stommel{}param_valuesModel parameters are stored in param_values — a dict mapping names to constants, callables, or Forcing objects. Every subclass populates it at __init__.
# Construct with keyword arguments
model = Stommel(E=0.3, T_star=1.0, S_star=0.0)
print("param_values:", model.param_values)param_values: {'alpha': 1.0, 'beta': 1.0, 'k': 1.0, 'E': 0.3, 'lambda_T': 1.0, 'lambda_S': 1.0, 'T_star': 1.0, 'S_star': 0.0}
{}.list() and .doc().list(target) returns the names of a category; .doc(target) pretty-prints descriptions parsed from the class docstring, alongside current values.
Valid targets: "parameters", "state_variables", "diagnostic_variables".
# What parameters does this model have?
print("parameters: ", model.list("parameters"))
print("state_variables: ", model.list("state_variables"))
print("diagnostic_variables:", model.list("diagnostic_variables"))parameters: ['alpha', 'beta', 'k', 'E', 'lambda_T', 'lambda_S', 'T_star', 'S_star']
state_variables: ['T', 'S']
diagnostic_variables: ['q']
{}# Full descriptions + current values for parameters
model.doc("parameters")
Parameters — Stommel
═════════════════════════════════════════════════════════════════════════════
Name Current value Description
─────────────────────────────────────────────────────────────────────────────
alpha 1 Thermal expansion coefficient. Default 1.0.
beta 1 Haline contraction coefficient. Default 1.0.
k 1 Hydraulic constant controlling overturning
sensitivity. Default 1.0.
E 0.3 Net evaporation-minus-precipitation freshwater flux.
Default 0.0.
lambda_T 1 Thermal restoring rate. Default 1.0.
lambda_S 1 Saline restoring rate. Default 1.0.
T_star 1 Equilibrium temperature contrast. Default 1.0.
S_star 0 Equilibrium salinity contrast. Default 0.0.
═════════════════════════════════════════════════════════════════════════════
{}# State variable descriptions
model.doc("state_variables")
State variables — Stommel
══════════════════════════════════════════════════════════════════════
Name Kind Description
──────────────────────────────────────────────────────────────────────
T integrated
S integrated
══════════════════════════════════════════════════════════════════════
{}Two equivalent ways to change a parameter after construction:
# Option 1: direct attribute assignment — syncs param_values automatically
model.E = 0.5
print("E after direct assignment:", model.param_values["E"])
# Option 2: set_param_value — also adds keys not present at init
model.set_param_value("E", 0.3) # reset
print("E after reset: ", model.param_values["E"])E after direct assignment: 0.5
E after reset: 0.3
{}Any param_values entry can be a callable instead of a scalar. The dispatcher inspects the signature and accepts (t), (t, state), or (t, state, model). The first argument must be named t or time.
# E as a callable — gradual freshwater increase
def E_ramp(t):
return np.clip(0.012 * t, 0.0, 0.6)
model_callable = Stommel(E=E_ramp, T_star=1.0, S_star=0.0)
out_callable = model_callable.integrate(t_span=(0, 50), y0=[1.0, 0.0], method="RK45"){}t_plot = np.linspace(0, 50, 300)
fig, axes = plt.subplots(2, 1, figsize=(8, 5), sharex=True)
axes[0].plot(t_plot, [E_ramp(t) for t in t_plot], color="teal")
axes[0].set_ylabel("E(t)"); axes[0].set_title("Callable parameter E(t)")
axes[1].plot(out_callable.time, out_callable.diagnostic_variables["q"], color="purple")
axes[1].axhline(0, color="k", lw=0.8, ls="--")
axes[1].set_ylabel("q"); axes[1].set_xlabel("time")
plt.tight_layout(); plt.show()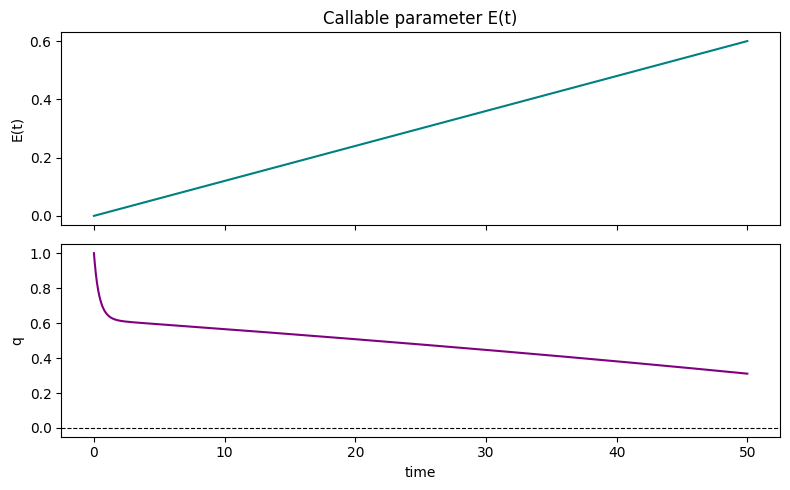
{}register_forcingAttaches a Forcing object to a named parameter or state variable after construction. Wraps dydt transparently — no changes to the model subclass required.
See the Forcing notebook for all construction patterns and the full register_forcing contract (attachment styles, timing, noise).
# Freshwater pulse forcing
fw = cc.Forcing.from_sequence([
cc.forcing.Hold(duration=10, value=0.0),
cc.forcing.Ramp(duration=5, y0=0.0, yf=0.5),
cc.forcing.Hold(duration=15, value=0.5),
cc.forcing.Ramp(duration=5, y0=0.5, yf=0.0),
cc.forcing.Hold(duration=15, value=0.0),
])
# Attach to E parameter (replacement — overrides E=0 set at construction)
model_forced = Stommel(E=0.0, T_star=1.0, S_star=0.0)
model_forced.register_forcing("E", fw)
out_forced = model_forced.integrate(t_span=(0, 50), y0=[1.0, 0.0], method="RK45"){}t_plot = np.linspace(0, 50, 500)
fig, axes = plt.subplots(2, 1, figsize=(8, 5), sharex=True)
axes[0].plot(t_plot, [fw.get_forcing(t) for t in t_plot], color="teal")
axes[0].set_ylabel("E forcing"); axes[0].set_title("Registered forcing on E")
axes[1].plot(out_forced.time, out_forced.diagnostic_variables["q"], color="purple")
axes[1].axhline(0, color="k", lw=0.8, ls="--")
axes[1].set_ylabel("q"); axes[1].set_xlabel("time")
plt.tight_layout(); plt.show()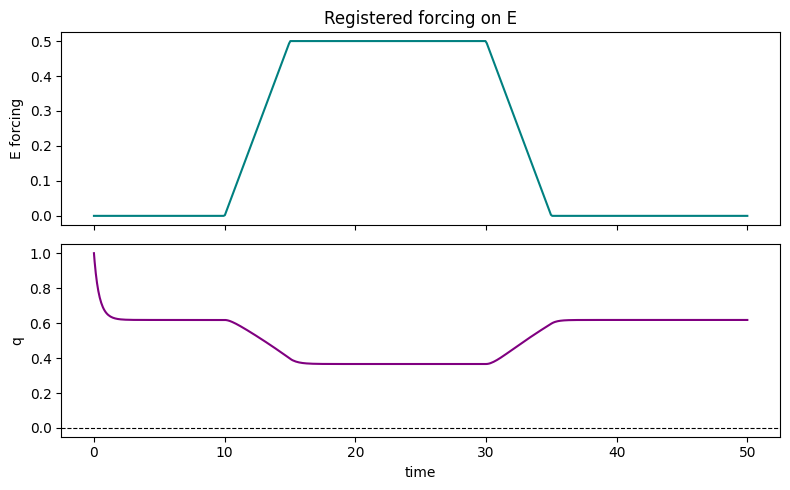
{}copy.copy(model) creates a shallow copy with reset diagnostic accumulators — useful for running ensembles from the same parameter set without interference.
import copy
base = Stommel(E=0.3, T_star=1.0, S_star=0.0)
runs = []
for T0 in [0.5, 1.0, 1.5, 2.0]:
m = copy.copy(base) # fresh accumulators, same parameters
out = m.integrate(t_span=(0, 50), y0=[T0, 0.0], method="RK45")
runs.append((T0, out)){}fig, ax = plt.subplots(figsize=(8, 4))
for T0, out in runs:
ax.plot(out.time, out.diagnostic_variables["q"], label=f"T₀={T0}")
ax.axhline(0, color="k", lw=0.8, ls="--")
ax.set_xlabel("time"); ax.set_ylabel("q")
ax.set_title("Ensemble — same parameters, different initial conditions")
ax.legend(); plt.tight_layout(); plt.show()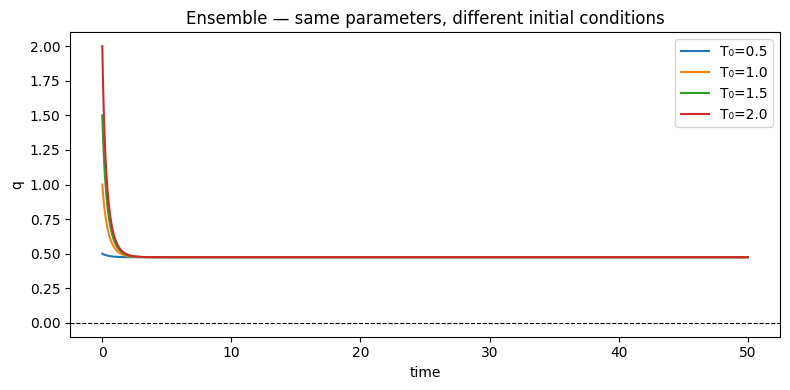
{}CCModel.integrate() returns a CCOutput — a container for one run’s results. It is never constructed directly; you always get one from integrate().
Separating output from model configuration means a single model instance can produce multiple independent outputs without them overwriting each other.
# A basic run to work with throughout this section
model = Stommel(E=0.3, T_star=1.0, S_star=0.0)
output = model.integrate(t_span=(0, 50), y0=[1.0, 0.0], method="RK45")
print(f"run_name: {output.run_name}")
print(f"time axis length: {len(output.time)}")
print(f"state_variable_names: {output.state_variable_names}")
print(f"diagnostic keys: {list(output.diagnostic_variables.keys())}")run_name: RK45, dt=variable
time axis length: 84
state_variable_names: ['T', 'S']
diagnostic keys: ['q']
{}State variables are stored in a structured numpy array, indexed by name. Diagnostics are in a plain dict of arrays. Both are aligned to output.time.
# State variables — structured array, index by name
T = output.state_variables["T"]
S = output.state_variables["S"]
# Diagnostics — dict of arrays
q = output.diagnostic_variables["q"]
fig, axes = plt.subplots(3, 1, figsize=(8, 7), sharex=True)
axes[0].plot(output.time, T, color="firebrick"); axes[0].set_ylabel("T")
axes[1].plot(output.time, S, color="steelblue"); axes[1].set_ylabel("S")
axes[2].plot(output.time, q, color="purple")
axes[2].axhline(0, color="k", lw=0.8, ls="--")
axes[2].set_ylabel("q"); axes[2].set_xlabel("time")
plt.tight_layout(); plt.show()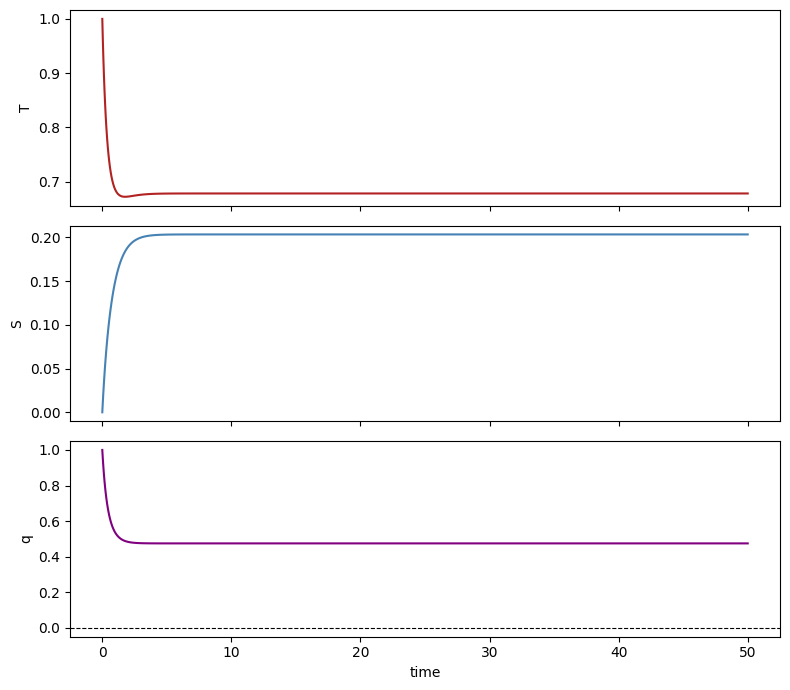
{}to_pyleo — exporting to pyleoclimoutput.to_pyleo(var_names) returns a pyleoclim.Series (single variable) or pyleoclim.MultipleSeries (list of variables). Works for both state variables and diagnostics.
# Single variable → pyleoclim.Series
ts_q = output.to_pyleo(var_names=["q"])
ts_q.plot(); plt.show()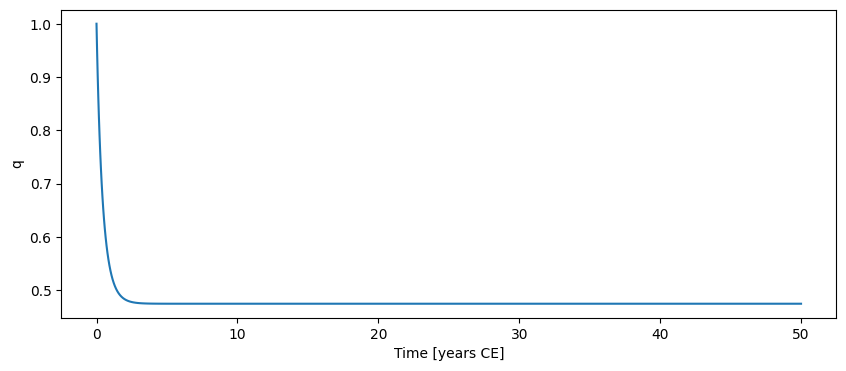
{}# Multiple variables → pyleoclim.MultipleSeries
ms = output.to_pyleo(var_names=["T", "S"])
ms.plot(); plt.show()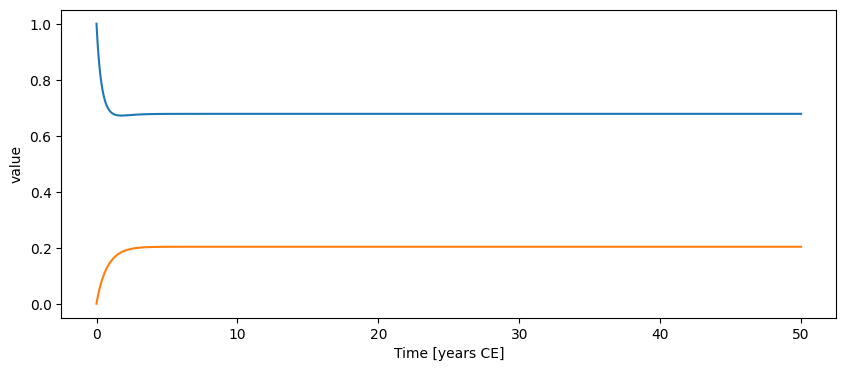
{}reframe_time_axis — resampling onto a new gridResamples state variables onto a requested time axis using the solver’s dense output (polynomial interpolation for RK45; linear fallback for fixed-step solvers). output.model_time always retains the solver’s original grid; output.time and output.state_variables are replaced.
import copy
# Work on a copy so the original output is unchanged
out_reframed = copy.copy(output)
out_reframed.reframe_time_axis(np.linspace(0, 50, 200)) # uniform 200-point grid
print(f"original grid: {len(output.time)} points")
print(f"reframed grid: {len(out_reframed.time)} points")original grid: 84 points
reframed grid: 200 points
{}fig, ax = plt.subplots(figsize=(8, 3))
ax.plot(output.time, output.state_variables["T"],
"o", ms=2, color="steelblue", label=f"solver grid ({len(output.time)} pts)")
ax.plot(out_reframed.time, out_reframed.state_variables["T"],
color="firebrick", lw=1.5, label="reframed (200 pts uniform)")
ax.set_xlabel("time"); ax.set_ylabel("T")
ax.set_title("reframe_time_axis — dense-output interpolation")
ax.legend(); plt.tight_layout(); plt.show()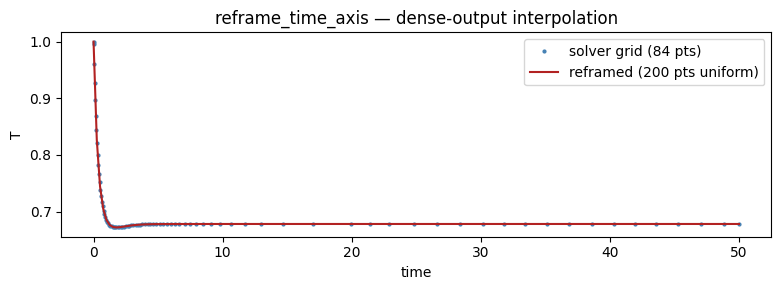
{}add_noise / remove_noise — post-hoc noiseAdds externally supplied noise to any state or diagnostic variable after integration. The original clean values are saved on the first call so remove_noise can restore them. Useful for simulating observation uncertainty without re-running the model.
import copy
out_noisy = copy.copy(output) # work on a copy
# Generate white noise scaled to ~2% of the q range
rng = np.random.default_rng(42)
noise = rng.normal(0, 0.02, size=len(out_noisy.diagnostic_variables["q"]))
out_noisy.add_noise("q", noise)
print("noisy q range:", out_noisy.diagnostic_variables["q"].min().round(3),
"–", out_noisy.diagnostic_variables["q"].max().round(3))noisy q range: 0.441 – 1.006
{}fig, ax = plt.subplots(figsize=(8, 3))
ax.plot(output.time, output.diagnostic_variables["q"],
color="purple", lw=1.5, label="clean")
ax.plot(out_noisy.time, out_noisy.diagnostic_variables["q"],
color="gray", lw=0.8, alpha=0.8, label="+ noise")
ax.set_xlabel("time"); ax.set_ylabel("q")
ax.set_title("add_noise — white noise on overturning diagnostic")
ax.legend(); plt.tight_layout(); plt.show()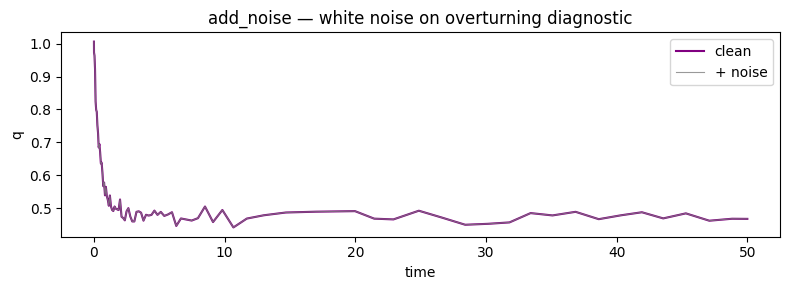
{}# Restore the clean series
out_noisy.remove_noise("q")
print("after remove_noise, q matches original:",
np.allclose(out_noisy.diagnostic_variables["q"],
output.diagnostic_variables["q"]))after remove_noise, q matches original: True
{}The features below are less commonly needed but can be useful for experiments that would otherwise require writing a new subclass.
set_function — swapping a calculation methodReplaces a model calculation method on a single instance without subclassing. The replacement callable can be bound as an instance method (first arg named self or model) or as a plain function (any other first arg name); bind is inferred automatically or can be set explicitly.
# Replace the overturning formula on one instance only
def weaker_overturning(self, t, x):
"""Overturning with halved hydraulic constant k."""
T, S = x[0], x[1]
alpha = self.get_param_value("alpha", t, x)
beta = self.get_param_value("beta", t, x)
k = self.get_param_value("k", t, x)
return (k / 2.0) * (alpha * T - beta * S)
model_alt = Stommel(E=0.3, T_star=1.0, S_star=0.0)
model_alt.set_function("overturning", weaker_overturning)
out_alt = model_alt.integrate(t_span=(0, 50), y0=[1.0, 0.0], method="RK45"){}fig, ax = plt.subplots(figsize=(8, 3))
ax.plot(output.time, output.diagnostic_variables["q"],
color="purple", lw=2, label="default k")
ax.plot(out_alt.time, out_alt.diagnostic_variables["q"],
color="steelblue", ls="--", lw=2, label="k/2 (set_function)")
ax.axhline(0, color="k", lw=0.8, ls=":")
ax.set_xlabel("time"); ax.set_ylabel("q")
ax.set_title("set_function — swap overturning formula without subclassing")
ax.legend(); plt.tight_layout(); plt.show()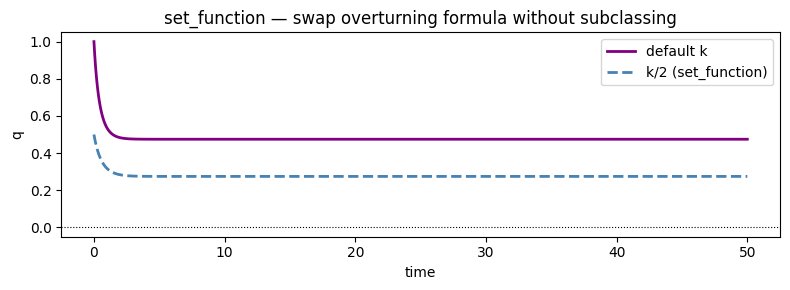
{}