DoublePendulum
DoublePendulum(
var_name='double_pendulum',
m1=1.0,
m2=1.0,
L1=1.0,
L2=1.0,
g=9.81,
d1=0.0,
d2=0.0,
state_variables=None,
diagnostic_variables=None,
*args,
**kwargs,
)Double pendulum — a conservative chaotic system.
Two point masses connected by rigid, massless rods swing freely from a pivot. The system is Hamiltonian (no damping by default) and is chaotic for most non-trivial initial conditions.
State variables: [θ₁, ω₁, θ₂, ω₂]
Parameters
var_name : = 'double_pendulum'-
Human-readable label.
m1 : = 1.0-
Masses of the two bobs in kg.
m2 : = 1.0-
Masses of the two bobs in kg.
L1 : = 1.0-
Rod lengths in metres.
L2 : = 1.0-
Rod lengths in metres.
g : = 9.81-
Gravitational acceleration in m/s².
d1 : = 0.0-
Optional linear damping coefficients on ω₁ and ω₂ (s⁻¹). Default 0 (Hamiltonian / energy-conserving).
d2 : = 0.0-
Optional linear damping coefficients on ω₁ and ω₂ (s⁻¹). Default 0 (Hamiltonian / energy-conserving).
Notes
State variables are theta1, omega1, theta2, omega2 in that order. Diagnostic variables energy, x1, y1, x2, y2 are computed after integration.
The double pendulum is chaotic. RK45 with default tolerances can show significant energy drift for long or large-amplitude runs. Use tight tolerances for accurate energy tracking::
model.integrate(..., kwargs={'rtol': 1e-10, 'atol': 1e-12})Examples
import matplotlib.pyplot as plt
import numpy as np
from climatecritters.model_critters.pendulum import DoublePendulum
model = DoublePendulum(m1=1.0, m2=1.0, L1=1.0, L2=1.0)
output = model.integrate(
t_span=(0, 60), y0=[np.pi/2, 0.0, np.pi/4, 0.0], method='RK45',
kwargs={'rtol': 1e-10, 'atol': 1e-12},
)
ts = output.to_pyleo(var_names=['theta1'])
ts.plot()
plt.savefig('docs/reference/figures/DoublePendulum_example.png',
dpi=150, bbox_inches='tight')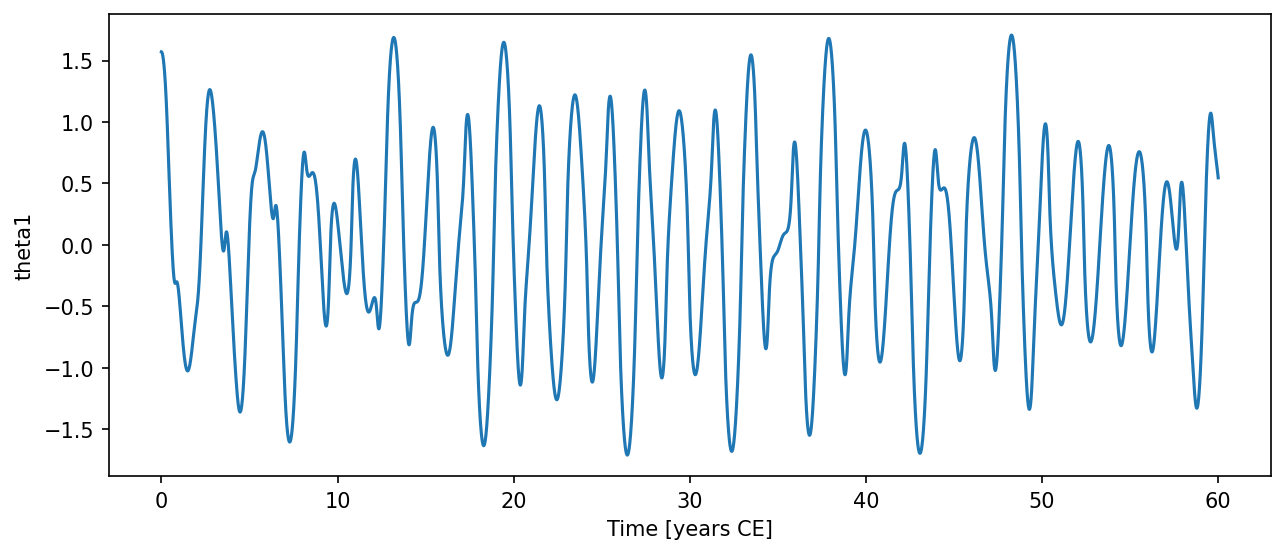
Methods
| Name | Description |
|---|---|
| cartesian_positions | Return (x1, y1, x2, y2) from the last integration run. |
cartesian_positions
DoublePendulum.cartesian_positions()Return (x1, y1, x2, y2) from the last integration run.